
Пассивное тепловидение и методы C-UAS
Опасность беспилотников и срочная необходимость в системах противодействия БПЛА
Беспилотные авиационные системы (БАС/БПЛА, часто называемые "дронами") — это летательные аппараты и связанное с ними оборудование, которые не требуют навигации человеком-пилотом внутри транспортного средства, а могут управляться дистанционно с помощью ИИ или оператора-человека. С появлением и экспоненциальным ростом БАС, кажется, что в технических удобствах дронов зарождаются угрозы. В сентябре 2019 года хуситы из Йемена атаковали два крупных нефтяных объекта в Саудовской Аравии, повредив нефтеперерабатывающую инфраструктуру. В последние месяцы группа хуситов вновь заявила о своей ответственности за атаку дронов на аэропорт короля Абдаллы в Саудовской Аравии, в результате чего пострадали 16 человек разных национальностей — беспилотные летательные аппараты сбросили взрывчатые вещества.
Использование дронов в коммерческих и промышленных целях — это одно, но вооружённые дроны, нанятые как государственными, так и негосударственными субъектами с недобрыми намерениями, создают опасности и вызывают проблемы в обеспечении общественной безопасности, защиты личного пространства, национальной обороны и т.д. Вооружённые дроны могут быть оснащены бомбами и боеприпасами или использоваться для разведки с целью выявления потенциальных рисков химических или биологических атак. Даже коммерчески доступные беспилотники могут использоваться в зловредных целях. Подумайте о многочисленных коммерческих объектах, спортивных стадионах и критически важных инфраструктурах, расположенных ниже 400 футов по высоте — и вы сможете представить потенциальные риски от дронов.
Правительства и негосударственные организации по всему миру принимают меры по ограничению злоупотребления дронами, и одной из самых убедительных и мощных мер является разработка надежных систем противодействия беспилотным авиационным системам (противодействие БПЛА).
Системы противодействия беспилотным авиационным системам или C-UAS/C-UAV — это специализированные технологии, предназначенные для обнаружения, отслеживания, прерывания или даже уничтожения дронов с целью предотвращения несанкционированного проникновения дронов в определённые зоны. В этих системах противодействия используются различные методы для мониторинга воздушного пространства и выявления подозрительных целей, включая радары, визуальные камеры, а также тепловизоры диапазонов LWIR, MWIR и SWIR. Основная сложность технологий C-UAS заключается в обнаружении малых беспилотных летательных аппаратов, так как такие аппараты могут иметь значительно меньшие размеры по сравнению с пилотируемыми самолетами, что затрудняет их раннее выявление и отличение от других помех, таких как птицы, насекомые и т.д. Особенно трудной задачей является противодействие малым беспилотным летательным аппаратам (Counter-Small Unmanned Aerial Vehicles), что создает серьезные вызовы для существующих технологий. В этой статье рассматриваются преимущества и недостатки пассивного теплового изображения и других методов, используемых в системах C-UAS.

Рисунок 1. показывает три примера коммерческих дронов, включая квадрокоптер, гексакоптер и самолет с фиксированным крылом, доступных на рынке.
a. DJI FPV
b. DJI Matrice 600
c. Nimbus 1800 VTOL V2
Основные возможности C-UAS
1. DRI и количество пикселей на цели
Важно понять концепцию DRI перед оценкой возможностей подходов C-UAS.
DRI означает обнаружение (Detection), распознавание (Recognition) и идентификацию (Identification) — три основных этапа визуального обнаружения. На этапе обнаружения объект замечается (вы видите объект), на этапе распознавания оператор может классифицировать объект (вы можете определить, является ли объект транспортным средством, животным, зданием и т.д.), а на этапе идентификации оператор может описать объект с максимальной точностью (танк, кролик, офисное здание и т.п.).
Пиксели на цели означают количество пикселей, которые занимает объект на экране изображения. Чем больше пикселей на цели, тем больше деталей. Согласно критериям Джонсона, количество пикселей, необходимое для выполнения каждого из трех этапов, стандартизировано.
Критерии Джонсона перечислены ниже:
- Обнаружение: 2 вертикальных пикселя на цели
- Распознавание: 8 вертикальных пикселей на цели
- Идентификация: 14 вертикальных пикселей на цели
Количество пикселей на цели зависит от угла обзора объектива, разрешения сенсора изображения и размеров объекта. Крупные объекты, снятые камерами с высоким разрешением и узким углом обзора, будут иметь больше пикселей на цели. Мощные системы C-UAS должны обеспечивать максимально возможное количество пикселей на цели на каждом выбранном оператором фокусном расстоянии для упрощения процесса DRI.
2. Дальнее обнаружение
Как показала катастрофа в аэропорту короля Абдаллы в Саудовской Аравии, дроны взлетели из аэропорта Саны в столице Йемена за сотни миль от саудовского аэропорта. Авария могла быть предотвращена, если бы дроны были обнаружены и перехвачены на середине полёта. Поэтому системы противодействия беспилотным летательным аппаратам должны уметь обнаруживать дроны на большом расстоянии, а способности DRI для малых БПЛА в отдалённых районах должны иметь высокий приоритет и быть улучшены, что увеличит время для операторов на оценку ситуации и разработку рациональных решений по устранению угроз.
3. Противодействие роям дронов и другим уловкам
Возможно, противник отправит несколько дронов роем вместо одного. Системы C-UAS должны быть способны быстро реагировать на множественные угрозы.
Также могут быть применены другие уловки, такие как радиопомехи и дроны в «тёмном режиме», чтобы обмануть системы противодействия. Этот фактор также должен учитываться при проектировании систем C-UAS.
4. Мобильность
C-UAS должны быть максимально мобильными, чтобы их можно было удобно переставлять в любое время и в любом месте, например, для охраны передовой базы или протяжённой границы. Портативные функции также необходимы при выполнении мобильных операций на море, в воздухе, на земле и т.д.
5. Лёгкость и компактные размеры
Большой вес особенно нежелателен в случае мобильных систем C-UAS, поскольку он снижает гибкость и эффективность мобильных комплексов, что приводит к потере ценного времени на принятие решений.
Компактные размеры выгодны для скрытных операций. Плотная интеграция систем C-UAS, таким образом, является ещё одним направлением, которое производители могут исследовать в будущем.
6. Соразмерные затраты
Системы C-UAS, как правило, дорогие. В то же время коммерческие дроны гораздо более доступны по цене. Поэтому чрезмерные расходы на покупку, обслуживание, ремонт и модернизацию систем C-UAS, которые истощают бюджеты государственных и негосударственных операторов, нежелательны. В будущем производители C-UAS должны использовать существующие технологии и разрабатывать новые конструкции для создания более недорогих решений.
7. Гибкие механизмы зума и захват цели
В некоторых случаях необходим панорамный обзор всей зоны, тогда как для DRI малых БПЛА требуется крупный план. Неограниченные возможности зума особенно важны для гибкого изменения угла обзора и для быстрого захвата интересующих целей с произвольной точностью. Независимо от того, является ли механизм зума моторизованным или ручным, непрерывным или ступенчатым, процесс зума должен быть быстрым и отзывчивым, чтобы оператор мог экономить время при оценке чрезвычайных ситуаций.
Система противодействия беспилотникам также должна включать автоматический механизм фокусировки, чтобы при увеличении фокус всегда оставался на цели.
Оценка пассивного тепловизионного и других методов в качестве подходов C-UAS
Видимое, SWIR-изображение и радар как подходы C-UAS
Методы такие, как видимое изображение, SWIR-изображение и радар, относятся к активным методам визуализации, что означает, что обнаружение основано на электромагнитном излучении, исходящем от источника и отражённом от целей, а не на излучении, исходящем от самих целей. Видимое и SWIR-изображение опираются на свет от внешних источников, таких как солнце, городское освещение, установленные осветители и другие земные источники света. Поскольку они работают на основе отражения света, видимые и SWIR-камеры имеют преимущество в более высокой схожести с человеческим зрением, что облегчает процесс распознавания. Более того, видимые и SWIR-сенсоры с высоким разрешением гораздо доступнее и дешевле, чем высокоразрешающие MWIR/LWIR сенсоры, поэтому изображения, полученные с помощью видимых и SWIR-камер, часто имеют больше пикселей на цели, что критично для C-UAS. Однако видимая и SWIR-визуализация подвержены негативному влиянию при плохом освещении, например ночью, в тумане или дожде, что ограничивает их применение. Также из-за сильного атмосферного поглощения видимого и SWIR-света их возможности обнаружения значительно снижаются с увеличением расстояния до цели.
Радар посылает радиоволны и принимает отражённые сигналы для определения положения, относительной скорости и очертаний целей с использованием эффекта Доплера. Высококачественное 2D и 3D изображение может быть получено с помощью методов SAR или ISAR. Поскольку атмосферное поглощение для радиочастот слабее, а погодные явления и температура окружающей среды мало влияют на работу радара, он превосходен в плане большой дальности обнаружения и нечувствительности к погодным и тепловым условиям.
Тем не менее, радар также имеет проблемы в качестве средства противодействия беспилотникам. Во-первых, радар различает цели и фон по различным диэлектрическим постоянным, то есть в нормальных условиях радиочастотные волны отражаются или рассеиваются на границах твердых объектов и воздуха. Однако материалы, поглощающие радарные волны, содержащие резистивные или магнитные компоненты, могут использоваться на дронах или боевой технике, делая цели "невидимыми" для радара. Во-вторых, радар уязвим к помехам, когда внешние радиосигналы той же частоты намеренно передаются для сокрытия целей. Радиопомехи — распространённый метод в электронной войне. В-третьих, радар подвержен шумам и помехам, включая многолучевые эхо-сигналы от нежелательных объектов и интерференцию радиоволн.
Пассивное тепловизионное изображение MWIR и LWIR как подходы C-UAS
MWIR (средневолновой инфракрасный) и LWIR (длинноволновой инфракрасный) тепловизионный методы работают в спектральных диапазонах 3–5 микрон (MWIR) и 8–12 микрон (LWIR). Эти два метода относятся к пассивной тепловизионной съемке. Принцип работы основан на том, что камеры MWIR и LWIR собирают и фокусируют инфракрасное излучение, исходящее от объектов (все объекты с температурой выше абсолютного нуля излучают инфракрасное излучение) через MWIR или LWIR объективы на инфракрасный сенсор, который визуализирует тепловое излучение объектов.
Датчики тепловизоров делятся на два типа: охлаждаемые фотонные сенсоры и неохлаждаемые тепловые сенсоры. Фотонный сенсор обычно оснащён системой охлаждения и генерирует прямой электрический сигнал после поглощения инфракрасного излучения, тогда как тепловой сенсор сначала изменяет температуру, а затем генерирует электрический сигнал — свойства материала сенсора влияют на то, как изменение температуры вызывает электрический эффект. В сравнении фотонные сенсоры более чувствительны, а неохлаждаемые тепловые сенсоры дешевле. На современном рынке LWIR камеры обычно оснащаются неохлаждаемыми сенсорами, а MWIR камеры — охлаждаемыми.
MWIR и LWIR тепловизионная съемка имеет множество преимуществ. Поскольку эти камеры создают изображение на основе теплового излучения от объектов, они не зависят от внешних условий освещения, позволяя обнаруживать цели в темноте и при плохой погоде. Согласно теории атмосферных окон, коэффициент пропускания MWIR и LWIR излучения в атмосфере выше, чем у видимого и SWIR диапазонов, что позволяет инфракрасным волнам MWIR и LWIR распространяться на большие расстояния без сильного поглощения и получать тепловое излучение дронов на большом расстоянии.

Рисунок 2. Атмосферные окна
По сравнению с радарами, тепловизионные камеры диапазонов MWIR и LWIR, хотя и менее приспособлены для работы на больших расстояниях, являются более надёжными для работы в условиях противодействия. Например, противоборствующая сторона может использовать радиопоглощающие материалы для изготовления дронов, превращая их в неуловимые призраки. Либо может применяться радиопомехи для нарушения радиосигналов, а обнаружение может быть затруднено даже в случае нахождения поблизости радиоустройства (даже без враждебных намерений), передающего волны на тех же радиочастотах, что и радар.
В то время как в случае тепловизионного изображения MWIR и LWIR такие проблемы менее актуальны. Все объекты, имеющие температуру выше абсолютного нуля, обладают внутренней тепловой энергией и излучают инфракрасное излучение. Пока существует разница температур между дроном и окружающей средой, независимо от материалов, из которых изготовлен дрон, он будет обнаружен. В отличие от радара, на данный момент не существует методов «теплового маскирования» дронов. Также нет подхода, подобного радиопомехам, который мог бы заглушить тепловые сигналы, хотя тепловизоры всё же подвержены тепловым шумам.
Кроме того, тепловизионные системы LWIR и SWIR являются пассивными. Проблема активных методов визуализации заключается в том, что активные датчики сами излучают оптические или радиосигналы, и противоборствующая сторона может определить местоположение комплекса C-UAS. Пассивная тепловизионная съёмка представляет собой многообещающую альтернативу для устранения этой проблемы.
Однако у тепловизоров MWIR и LWIR также есть свои слабые стороны. Датчики LWIR и MWIR часто имеют меньше пикселей по сравнению с датчиками видимого и SWIR диапазонов, поэтому количество пикселей на цели уменьшается, что приводит к снижению детализации изображения и затрудняет распознавание и идентификацию дронов. При меньшем количестве пикселей на цели (POT) будет сложно отличить ложные сигналы от дронов на больших расстояниях (например, БПЛА с фиксированным крылом может издалека выглядеть на экране так же, как и птица).
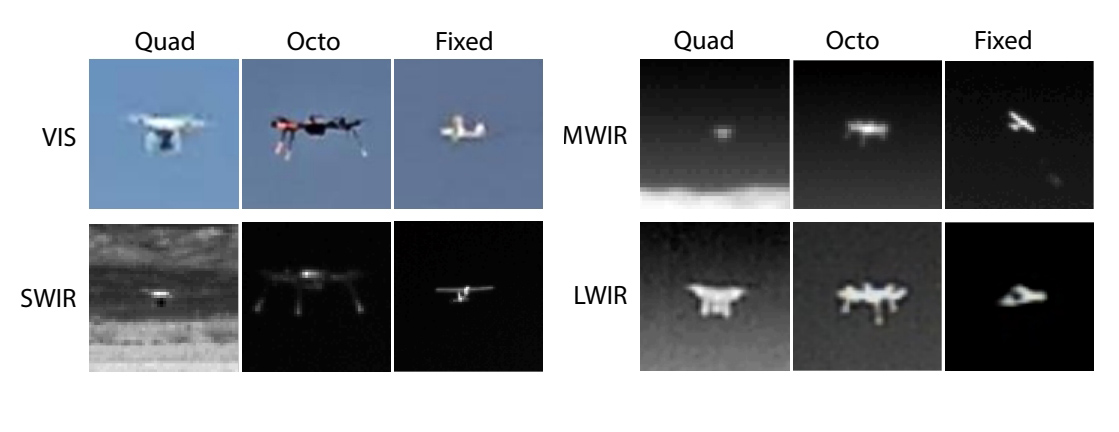
Рисунок 3. показывает серию изображений квадрокоптера, октокоптера и самолёта с фиксированным крылом, снятых с помощью камер VIS, SWIR, MWIR и LWIR. Как видно на изображениях, цели на снимках, сделанных камерами MWIR и LWIR с более низким разрешением и, следовательно, меньшим количеством пикселей на цель, труднее оценить, чем на снимках двух других типов. Самолёт с фиксированным крылом на изображении MWIR сильно похож на птицу.
Ещё одним негативным фактором является тепловой шум. В нормальных условиях дроны, движущиеся на больших высотах, имеют более высокую температуру, чем холодный фон, и на тепловых изображениях отображаются различными цветами и яркостью. Однако, когда дроны приближаются к горизонту, температура окружающей среды повышается, что приводит к такому угловому положению над землей, при котором дроны становятся невидимы для тепловизора (этот угол называется "угол теплового эквивалента", и мы подробно обсудим его в последующем разделе). Такая особенность тепловизоров является недостатком для систем противодействия дронам. Другие объекты с похожими температурами могут восприниматься как тепловой шум, мешающий обнаружению дронов.
Проблема самонагрева сенсоров, создающая тепловой шум, особенно мешает LWIR камерам, которые часто используют неохлаждаемые микроболометрические детекторы. В то время как MWIR камеры, часто оснащённые охлаждаемыми FPA детекторами, обладают большей чувствительностью и меньшим тепловым шумом.
Большинство материалов, пропускающих инфракрасное излучение, используемых для изготовления объективов тепловых камер LWIR и MWIR, имеют коэффициенты теплового расширения (CTE), которые на несколько порядков выше, чем у материалов объективов для видимого света. Показатель преломления объективов реагирует на изменения температуры, что приводит к явлению, называемому тепловым дефокусом (то есть смещению фокальных точек объективов от их проектных положений из-за изменений температуры). Для компенсации эффекта теплового дефокуса могут использоваться атермализированные конструкции, такие как пассивные оптические атермализированные объективы.
Сравнение теплового изображения MWIR и LWIR
1. Возможности сбора теплового излучения
Как упоминалось в предыдущих абзацах, пассивное тепловое изображение работает на основе сбора тепловой энергии. Возможности сбора теплового излучения являются важным показателем при определении характеристик тепловизора.
Тепловой поток — это общее тепловое излучение от объекта и фона. Согласно закону Планка, чем выше температура, тем выше спектральная излучательная способность (на всех длинах волн) и тем короче длина волны максимума излучения. При нормальной атмосферной температуре 300K пик излучения приходится на диапазон LWIR в области 8-12 микрон.
Тепловой поток от объектов должен пройти через атмосферу, чтобы достичь детектора. Поскольку атмосфера — это не вакуум, а смесь различных газов (например, азот, CO2 и O2) и частиц (пыль, грязь, пары), она поглощает, отражает, преломляет и рассеивает электромагнитное излучение. Поэтому атмосферная пропускная способность является ещё одним важным фактором, влияющим на возможности сбора теплового излучения.
Атмосфера более прозрачна для LWIR излучения, чем для MWIR. Этот факт, в сочетании с тем, что пик излучения находится в области LWIR при нормальной температуре, означает, что в тепловизор попадает больший объём теплового излучения. Следовательно, LWIR тепловизоры теоретически хорошо работают в большинстве нормальных условий, включая противодействие БПЛА («нормальные» здесь означают атмосферную температуру около 300K).
При более высоких температурах пик излучения смещается к более коротким длинам волн, поэтому MWIR тепловизоры работают лучше в условиях высоких температур. Что касается атмосферной пропускной способности, то, как правило, поглощение MWIR излучения в парах значительно меньше, чем LWIR излучения. Поэтому MWIR тепловизоры рекомендуются для влажных и жарких океанических климатов.
2. Тепловой контраст
Тепловой контраст — ещё один критически важный элемент, влияющий на чёткость теплового изображения. В зависимости от разницы температур тепловизоры различают объекты и фон по разной яркости и цветам. Поскольку MWIR камеры часто оснащены охлаждаемыми сенсорами с большей чувствительностью, чем неохлаждаемые сенсоры в LWIR камерах, тепловой контраст у MWIR камер по природе выше, чем у LWIR. Объекты с температурой, близкой к дрону, считаются помехами, мешающими системе C-UAS. Также доказано, что MWIR тепловизоры лучше справляются с отсевом помех и мусора по сравнению с LWIR. С увеличением дальности обнаружения отсев помех становится всё сложнее из-за уменьшения количества пикселей как на цели, так и на помехах. Поэтому для дальнего обнаружения часто выбирают MWIR тепловизоры с выраженным тепловым контрастом вместо LWIR.
Угол температурного равенства (TEA) представляет собой угловую меру, отражающую способность тепловизоров различать цели и фон. На большой высоте большинство дронов имеют температуру выше температуры фона, но при приближении дронов к горизонту температура окружающей среды повышается, постепенно снижая контраст цели. TEA — это угол над горизонтом, при котором тепловой контраст между целью и фоном становится нулевым, и дроны становятся невидимыми в тепловом изображении. Тепловизоры MWIR обеспечивают меньший TEA, чем тепловизоры LWIR.
3. Вопросы веса и апертуры объективов MWIR и LWIR
Самонагрев тепловой камеры создаёт тепловой шум и приводит к путанице в термальных сигналах цели. Результатом является увеличение NETD (эквивалентной разницы температур шума) и потеря чувствительности. Поэтому охлаждаемый фотонный детектор значительно чувствительнее, чем неохлаждаемые тепловые детекторы.
MWIR камеры часто используют охлаждаемые детекторы (например, детекторы HgCdTe, Quantum Well, Stibide), в то время как LWIR камеры часто используют неохлаждаемые детекторы (например, детекторы на основе оксида ванадия, FPA InSb).
Число f или диафрагменное число, f/#, является мерой светосилы камеры, а в случае тепловых камер — мерой сбора теплового излучения. f-число = фокусное расстояние объектива / диаметр апертуры объектива. Охлаждаемый детектор с более высокой чувствительностью позволяет использовать более высокие значения f-числа (и, следовательно, меньшие апертуры объектива), тогда как неохлаждаемый детектор с низкой чувствительностью требует низких f-чисел (то есть больших апертур, чтобы обеспечить достаточный сбор излучения), если объективы LWIR должны иметь такое же фокусное расстояние, как и объективы MWIR. Поэтому объективы тепловизоров MWIR могут быть значительно компактнее, чем объективы тепловизоров LWIR, что экономит затраты на производство и одновременно снижает вес систем C-UAS. Поэтому для мобильных C-UAS систем предпочтение стоит отдавать MWIR камерам, поскольку большой вес затрудняет перемещение оборудования. Кроме того, компактные размеры делают MWIR более предпочтительным вариантом для C-UAS, снижая риск обнаружения.
Аналогично, объектив тепловизора MWIR с той же апертурой, что и у LWIR объектива, может иметь большее фокусное расстояние благодаря возможности использовать более высокое f-число. Отличительный тепловой контраст MWIR улучшает возможности отсеивания помех и посторонних объектов на больших расстояниях. Поэтому MWIR камеры на сегодняшний день более распространены на рынке для задач, требующих обнаружения на больших дистанциях.
Благодаря постоянным усилиям инженерной команды, компания Shalom EO достигла технического прорыва, разработав ультралёгкий модуль объектива тепловизора MWIR с непрерывным зумом 90-1100 мм f/5.5. Объективы с диаметром 223 мм и длиной 295,51 мм весят всего 4,2 кг, что представляет собой непревзойдённый компромисс между длинным фокусным расстоянием и проблемами веса. Эти объективы отлично подходят для выполнения различных задач, требующих дальнего обнаружения и высокого теплового контраста, таких как противодействие беспилотным летательным аппаратам (C-UAV/C-UAS).

Рисунок 4. Модуль объектива тепловизионной камеры Shalom EO с ультралёгким объективом с непрерывным зумом 90-1100 мм f/5.5 для MWIR
Стоимость
Тепловое изображение LWIR является более традиционным и экономичным вариантом. Камеры MWIR, с другой стороны, часто оснащены охлаждаемыми фотонными детекторами (которые достаточно дорогие), поэтому тепловизоры MWIR обычно дороже камер LWIR.
Заключение
Поскольку дроны всё больше становятся опасным оружием для незаконных вторжений, государственные и негосударственные акторы сталкиваются с серьезными изменениями в разработке зрелых, эффективных и доступных систем противодействия беспилотникам (C-UAS). Пассивное тепловое изображение LWIR и MWIR — два отличных подхода для создания C-UAS с высокой надежностью в различных условиях окружающей среды, значительными возможностями на дальних дистанциях и выдающейся способностью противостоять методам маскировки. Среди них тепловое изображение MWIR с лучшим контрастом целей на дальних дистанциях является основным направлением на современном рынке. Требуются дальнейшие исследования для более детальной оценки лучших подходов к системам противодействия беспилотникам.
Related Articles
Related Products

Tags: Пассивная тепловизионная съемка и технологии противодействия БПЛА (C-UAS)